Gabriel Aguiar Noury
on 22 October 2025
Another year, another ROSCon! This year we’re heading to Singapore, and Canonical is once again thrilled to sponsor this important community event. Just like last year in Odense, Denmark, we’re looking forward to the talks and workshops, which always inspire us and teach us new things about robotics. We’re excited to reconnect with our Southeast Asia community, especially after our earlier gathering at Canonical’s IoT day in Singapore.
We’re really looking forward to sharing some of the work we have done in the robotics space this year, alongside our partners Advantech & Botmind. From Advantech’s powerful platforms for robotics to Botmind’s unified fleet management solutions, our booth showcases collaborative efforts designed to help and guide ROS developers as they aim to simplify complexity and accelerate innovation.
Here’s a quick overview of what we’ll be showcasing at ROSCon booth 51/52, featuring our partners Advantech and Botmind.
A new open source observability stack
Our mission is to bring software to the widest audience. We took the latest step in this mission by bringing together popular open source tools, including Grafana, Prometheus, and Loki, to make it easy to set up a fully functional observability infrastructure for ROS 2 devices using Ubuntu. The same infrastructure used by our telco, logistics, aerospace, and data center customers is now available for robotics makers and ISVs.

The infrastructure is designed to bring together a unified platform for both open source and custom enterprise solutions (e.g. Botmind). Thus allowing companies to bring their own or preferred applications and tools in a tested, reliable, and open source infrastructure.
What can you do today with this beta observability stack
- Easily onboard your Ubuntu devices
- Automatically upload your ros2bags to a self-hosted server
- Remotely monitor a fleet of ROS 2 robots
- Access live ROS data
- Access live Ubuntu system data & logs
- Trigger alerts for events such as low battery or network loss
Learn More at ROSCon 2025
If you’re attending ROSCon 2025, we’ve got two exciting opportunities for you to dive deeper into observability for robotics systems.
Workshop: Demonstrating the Canonical Observability Stack for Devices
📍 Room: 330
🗓️ Date: Monday, October 27, 2025
⏰ Time: 10:30 AM – 11:30 AM
Join us for a hands-on workshop where we’ll demonstrate how the Canonical Observability Stack helps you monitor, debug, and optimize your robotic devices.
> All ROSCon attendees are welcome, even without the workshop ticket — no RSVP required!
Talk: Open-Source Robotics Observability at Scale!
📍 Track: Debugging
🗓️ Date: Tuesday, October 28, 2025
⏰ Time: 4:00 PM – 4:10 PM SST
In this talk, we’ll explore how open-source tools make large-scale observability and debugging in robotics simpler, faster, and more powerful.
Workshop: Hands-on ROS 2 with Rubik Pi 3
📍 Room: 330
🗓️ Date: Monday, October 27, 2025
⏰ Time: 11:30 AM – 12:30 PM
Join our partner Qualcomm to learn how to run ROS 2 on the RUBIK Pi 3, a compact platform optimized for edge robotics, powered by Ubuntu.
An “all-in-one“ ROS fleet management system
At ROSCon, we’re not just talking about observability; we’re showing how everything can come together in a real-world deployment. That’s why we’re excited to team up with Botmind, a Singapore-based robotics platform innovator, and deploy their fleet management service on top of our open source Canonical Observability Stack (COS) infrastructure.
Botmind’s mission is to simplify how businesses manage robot fleets. They build an “all-in-one” control platform that integrates multiple robots, real-time tracking, AI-powered scheduling, analytics, and a unified API layer. Their vision is bold: to let robotics operators manage everything, from mission assignments to health monitoring, via a single, intuitive control plane.
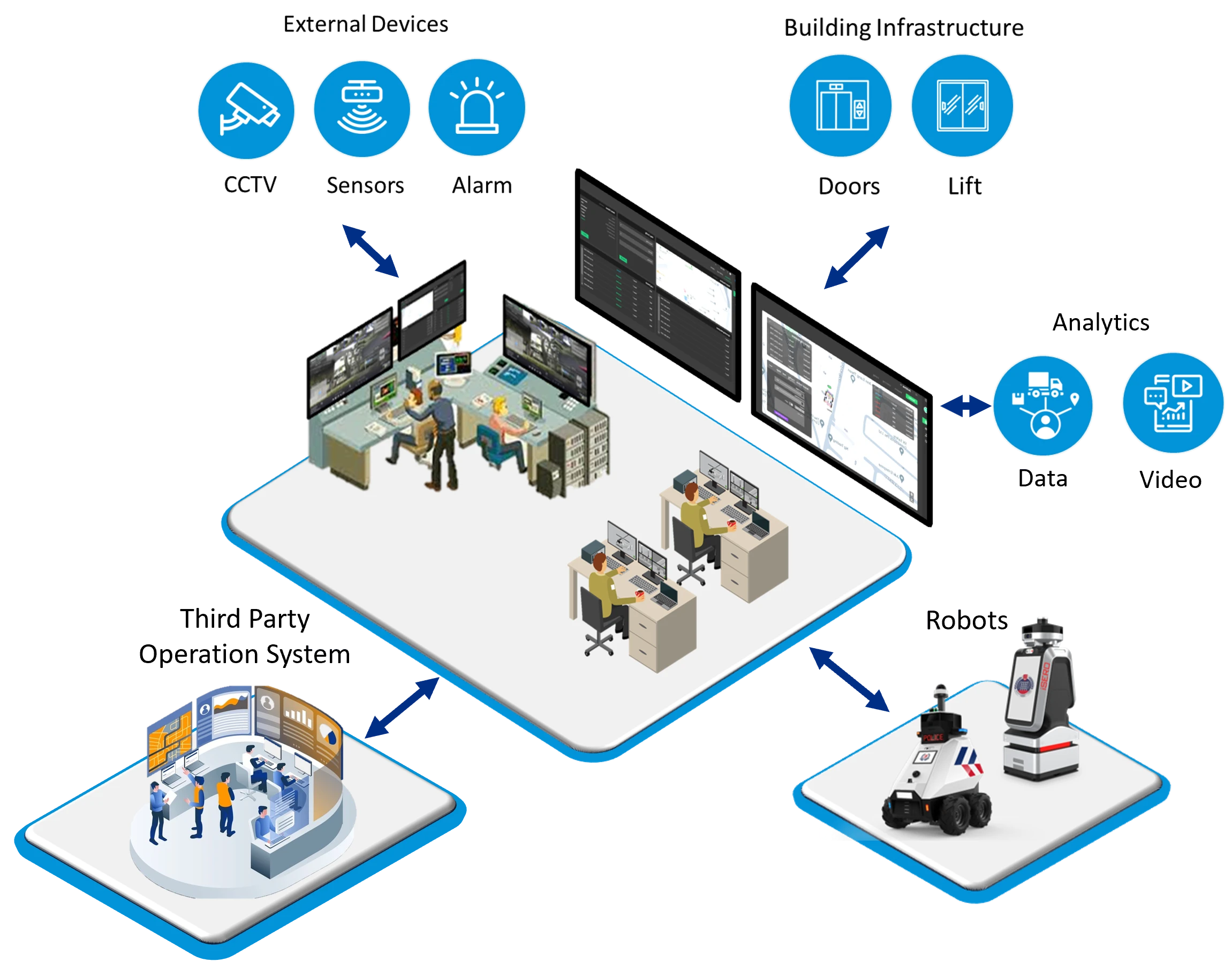
In our demo at ROSCon, we’ll show how Botmind’s proprietary fleet manager integrates with our COS infra, enabling:
- Deployment of their fleet management services within a robust, open-source stack
- Seamless interaction between Botmind’s APIs and our observability tools
- Live monitoring and orchestration of ROS-based robots through a unified dashboard
- End-to-end integration from the ROS layer all the way to fleet-level commands
Through this demo, we aim to prove that you can combine open observability and enterprise robot control in a modular, scalable way.
Visitors to booth 51/52 will be able to see first-hand how Botmind’s system works in tandem with our COS stack, giving developers, integrators, and system architects a compelling reference architecture for real robotic deployments.
A new foundation for autonomous robotics
We’re proud to collaborate with Advantech to showcase how advanced platforms and Ubuntu-based solutions accelerate the development of Autonomous Mobile Robots and robotic systems. Together, we’re addressing some of the toughest challenges faced by robotics developers, from real-time edge computing to secure and compliant deployments.
At ROSCon 2025, you can discover Advantech’s robotics platforms, powered by Ubuntu and its real-time kernel. Designed for ROS 2, it provides a unified and scalable hardware-software foundation that speeds up robot prototyping and deployment. Advantech’s AFE and ASR series edge computers integrate CPU, GPU, and NPU computing with industrial-grade reliability, supporting:
- Time-synchronized sensor fusion across LiDAR, IMU, and camera inputs
- Flexible modular I/O design for motor control, navigation, and perception
- Wide voltage and ruggedized design for demanding environments.
- Pre-validated ROS 2 environments and Advantech’s own ROS nodes for Modbus and OPC-UA integration

With Ubuntu Pro, Advantech extends long-term support, security, and maintenance for its Ubuntu-based hardware, including ESM for ROS, ensuring a consistent, secure, and reliable foundation throughout the robot’s lifecycle.
In our joint demo at booth 51/52, Canonical and Advantech will showcase how developers can move from prototype to production faster using Advantech hardware combined with Ubuntu Core, Canonical’s secure, immutable, and reliable operating system designed for edge deployments.
Ubuntu and NVIDIA Jetson Thor
Canonical recently announced official Ubuntu support for the NVIDIA Jetson Thor family, extending our collaboration with NVIDIA to accelerate AI innovation at the edge. In addition, Canonical announces it will support and distribute NVIDIA CUDA directly within Ubuntu’s repositories, making it easier than ever for developers to access GPU acceleration natively on Ubuntu. This partnership ensures that developers can rely on the same enterprise-grade security, stability, and performance on Jetson Thor that powers Ubuntu across clouds and data centers.
Observability on Jetson: monitoring the almighty Thor
In our demo at ROSCon, visitors will see COS running directly on an NVIDIA Jetson Thor device. Using the Grafana Agent, the system continuously collects rich performance and telemetry data from the Jetson platform, including CPU, GPU, and memory metrics, visualized in real time through Grafana dashboards.
By bringing COS to Jetson Thor, Canonical showcases how open source observability can extend all the way from the robot’s edge hardware to cloud-scale operations, empowering developers and integrators to optimize performance and reliability across every layer.
For more information, please visit NVIDIA at ROSCon.
See you soon in Singapore!
We can’t wait to see you at ROSCon! Join us to explore the latest advancements, connect with fellow innovators, and discover how Ubuntu and our partners are shaping the future of robotics. See you there!